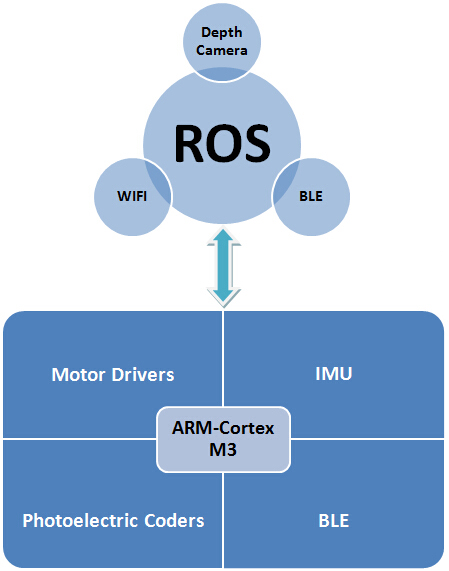
ROS is often used to drive robots because of its built-in diversified functions and good expansibility. It is mostly used in universities, research institutions or in the early stage of production to improve the efficiency of product R&D cycle. Later, when the product or function is finalized, the completed design and codes will be transplanted to the embedded system to achieve the best cost performance and high-speed performance.
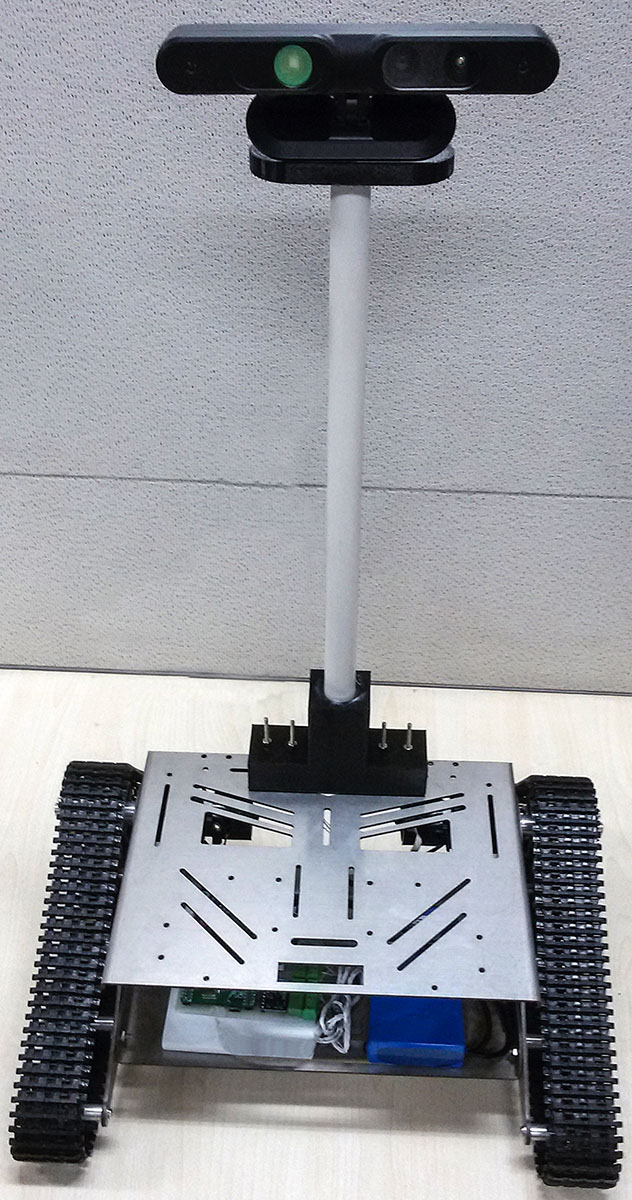
This is a crawler car made by us, with machine vision and automatic tracking function and built-in ROS host.
Leave a Reply
You must be logged in to post a comment.